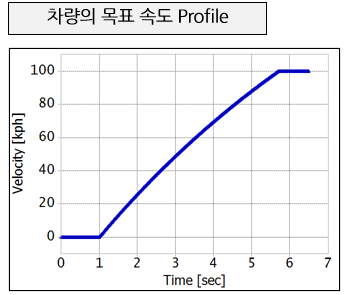
주행 토크를 이용한 차량의 목표 속도 제어
- 차량이 목표 속도로 주행하기 위한 모델링 방법은 간단히 모션을 이용하면 쉽게 정의할 수 있습니다. 그런데 차량의 바퀴에 토크를 입력하여 목표 속도로 주행시키기 위해서는 토크 제어 모델이 필요합니다.

- RecurDyn/CoLink를 이용하면 동역학 모델의 원하는 위치, 속도, 가속도 제어가 가능합니다.
일반적으로 제어 블럭을 통해 제어시스템을 모델링하고 RecurDyn 플랜트에서 위치, 속도, 가속도가 출력되어 CoLink로 전달됩니다. 이 데이터를 기반으로 제어시스템은 목표 위치, 속도, 가속도와의 차이를 계산하고 PID제어를 통해 다시 RecurDyn 플랜트에 힘 또는 토크가 입력되어 모델이 원하는 동작을 하도록 합니다.

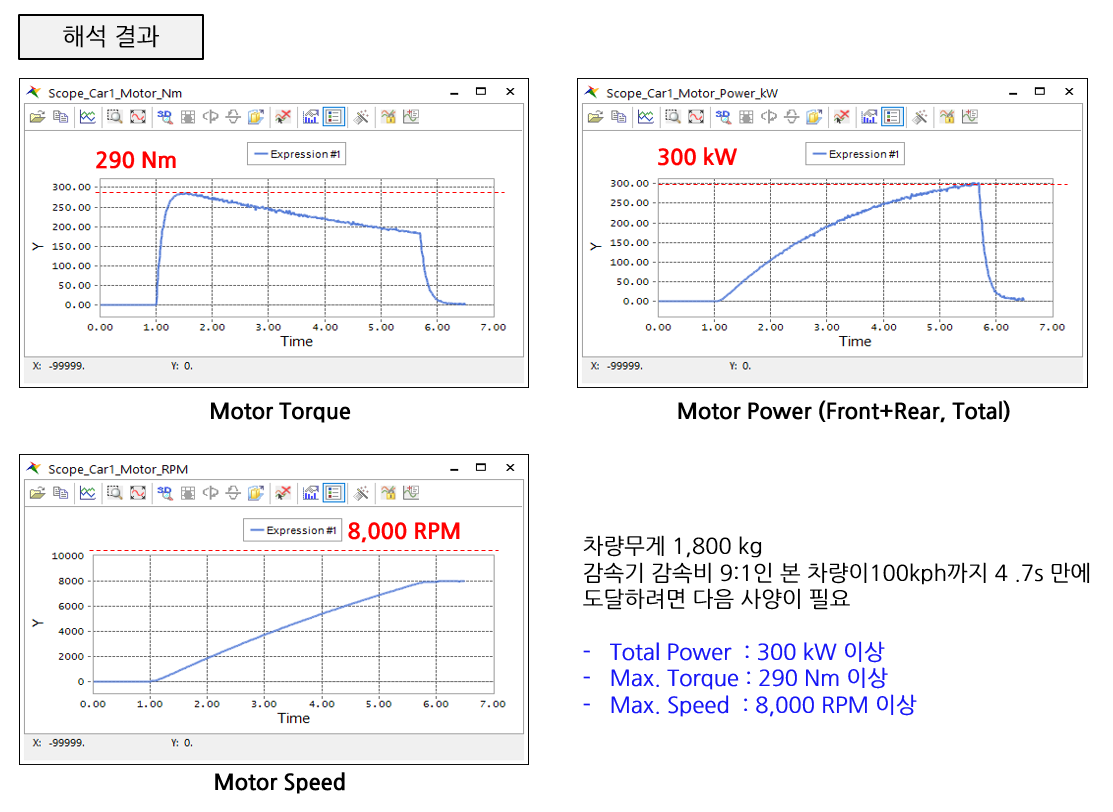
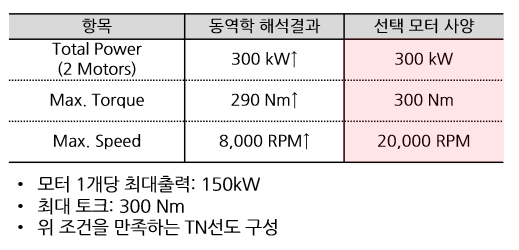
- 위의 차량모델이 목표속도로 주행시키도록 제어해석을 수행하게 되면 아래와 같이 모터의 토크 값과, RPM값을 계산할 수 있고 대략적인 모터의 스펙을 확인할 수 있습니다.
선정한 모터의 T-N선도를 고려한 차량의 목표 속도 제어 모델
- 앞서 해석한 결과로 적절한 모터 사양의 T-N선도를 정의합니다.
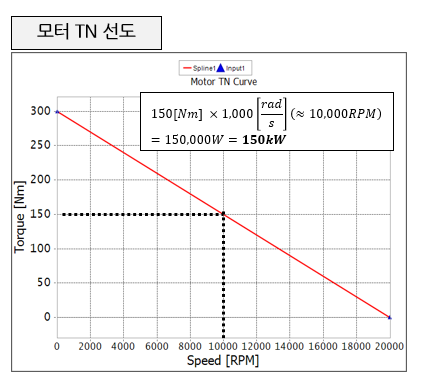
- 제어해석을 수행하게 되면 선정한 모터 T-N선도에 의해 해당 RPM에 따른 토크가 적용되는 결과를 확인할 수 있습니다. (8000RPM에서 발생하는 토크는 대략 170Nm)

예제 모델 문의
E-mail: tech.support@cmet.co.kr | Tel: 02-6335-7751
'RecurDyn > 활용사례' 카테고리의 다른 글
| [R2R2D] 멀티레이어 와인딩 시뮬레이션 (0) | 2024.11.01 |
|---|---|
| 모터 특성곡선을 이용한 모델링 방법 #1 (0) | 2024.10.10 |
| Expression을 이용한 공차 조인트 모델링 방법 (0) | 2024.06.17 |
| 제품의 전도 해석 방법(Toppling analysis) (0) | 2024.04.24 |



