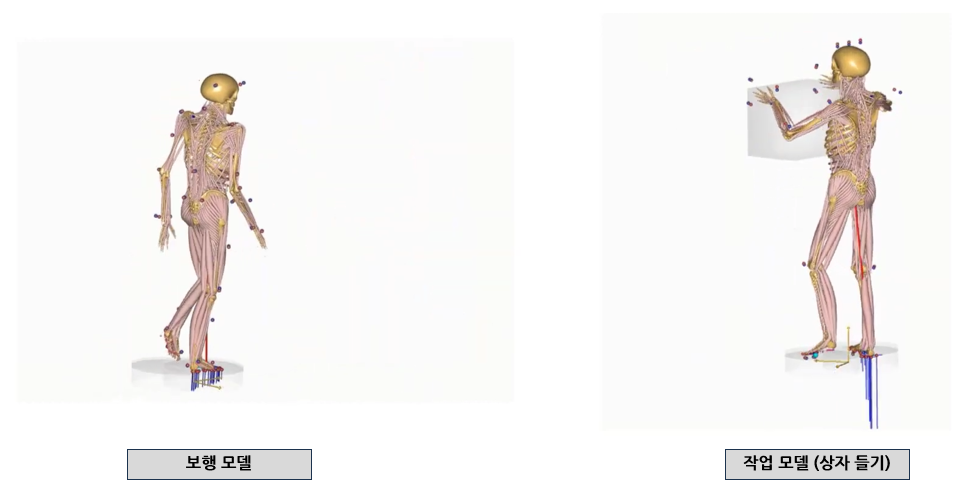
보행 모델과 작업 모델(상자들기)의 동작 비교
- AnyBody를 활용해 웨어러블의 개념 설계 방법을 소개한다.
- AnyReacForce 클래스를 이용해 작업에 필요한 최적 하중을 분석한다.
- 분석한 최적하중으로 웨어러블 개발에 필요한 하중을 적용하여, 웨어러블 로봇에 필요한 요소를 파악한다.

보행 모델과 작업 모델의 무릎 관절력(ProximoDistal) 비교
- 보행 모델의 최대 무릎 관절력(압축력)은 약 2500N이고, 작업 모델은 좌우 최대 무릎 관절력(압축력)은 약 3000N으로 비슷한 수준이다.

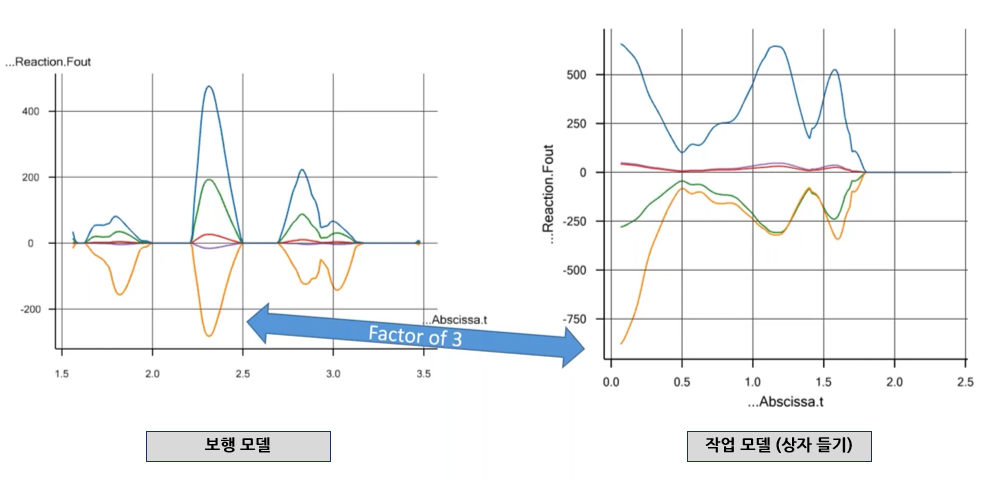
보행 모델과 작업 모델의 PatellaFemur 관절력 비교
- 보행 모델에서 최대 약 250N의 힘이 나타나며, 이 힘은 허벅지 근육의 당김과 슬개골 인대의 당김으로 발생한다.
- 작업 모델에서는 최대 약 750N의 힘이 나타나고, 상자를 들어올리기 위해 초기 무릎을 구부려 발생하는 힘으로 3배 이상 차이가 발생하는 것을 확인할 수 있다.
보행 모델과 작업 모델의 요추부 관절력 비교
- 보행 모델에서 최대 약 800N의 힘이 나타나고, 작업모델에서는 최대 약 3000N으로 4배 더 높게 나타난다.

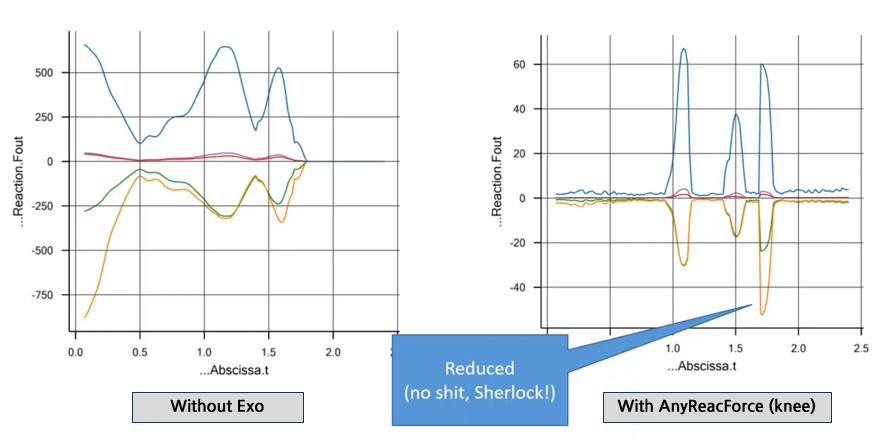
PatellaFemur 관절의 이상적인 보조력(Torque) 확인을 위한 AnyReacForce
- AnyReacForce는 AnyBody에서 정의할 수 있는 객체로 인체 모델의 어디든 부착할 수 있는 이상적인 모터이다.
- AnyReacForce를 무릎 관절에 적용해 인체 모델의 부하를 비교해 보면, PatellaFemur 관절력이 크게 감소한다는 것을 확인할 수 있다.

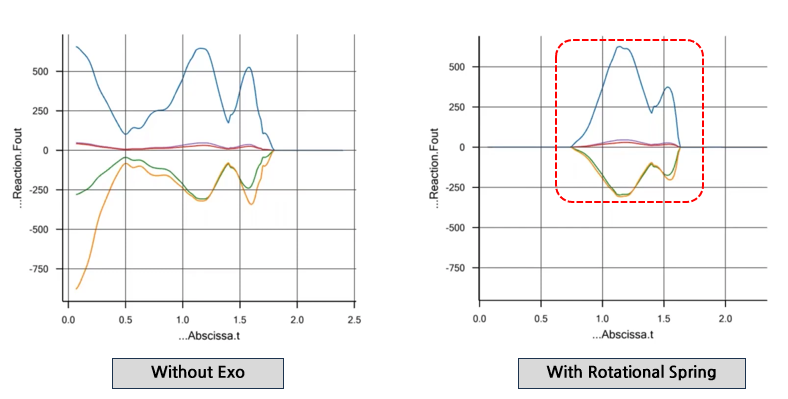
무릎 관절각도에 따른 이상적인 보조력(Torque)확인
- 출력된 이상적인 보조력 데이터를 무릎관절 각도에 따라 그리면 아래와 같이 나타난다. 이 그래프에 추세선을 그려 y=-89x -24.73의 선형 방정식을 확인한다.

- 이 선형 방정식을 이용해 회전스프링요소를 정의하고, 이상적인 보조력을 제외 한 상태로 Inverser Dynamics를 수행하고 PatellaFemur 관절력을 확인하면, 초기 힘은 많이 줄었지만 후반부의 힘(고관절까지 이어지는 대퇴사두근 영향)은 남아 있는 것을 확인할 수 있다.
웨어러블 로봇에 필요한 보조력 확인을 위한 AnyReacForce 활용
- 이상적인 보조력(AnyReacForce)을 적용 후 L5-Sacrum의 압축력을 비교하면 힘이 크키가 상당히 감소한 것을 확인할 수 있다.


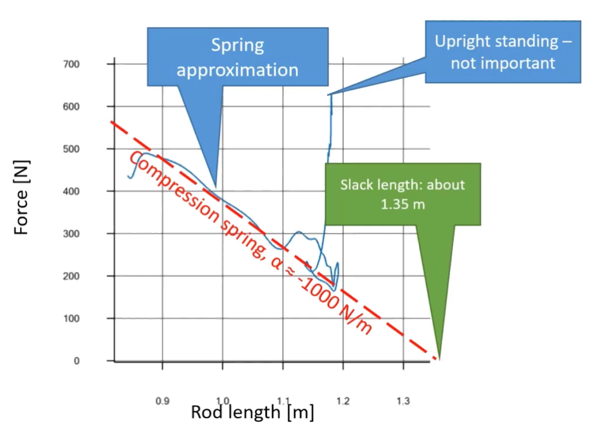
Rod 길에에 따른 이상적인 보조력(AnyReacForce) 확인
- Rod 길이에 따른 인장력은 대략 α = -1000N/m 계수(스프링상수) 값으로 근사화 할 수 있다.
- 이 스프링 계수를 이용해 Rod에 스프링요소를 정의하고, 이상적인 보조력을 제외 한 상태로 척추 관절력을 확인하면 초기 약3000N의 힘이 약1000N으로 감소하고, 선반에 상자를 놓을 때에도 힘이 감소한 것을 확인할 수 있다.

AnyBody 시뮬레이션을 통해...
- 웨어러블 로봇 설계에 대한 아이디어 확인 가능
- 인체 모델의 부하를 완화하기 위해 웨어러블 로봇에 어떤 요소가 필요한지 파악 가능
'AnyBody > AMMR' 카테고리의 다른 글
| 하체 근골격 모델 개요 및 버전 별 특징 (0) | 2026.04.07 |
|---|---|
| 새로운 근골격 손모델 (0) | 2024.10.15 |

