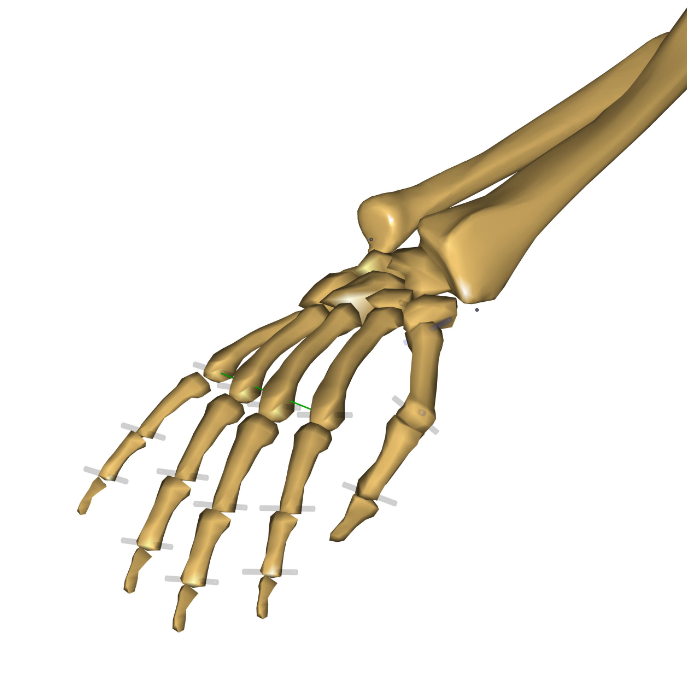
기존 Detailed Hand Model
- 기존 Detailed Hand Model은 17개의 DOF를 가지고 있는 모델입니다. 이 손 모델은 근육은 없지만 손가락 마디 관절이 있어서 동역학 해석은 가능합니다.
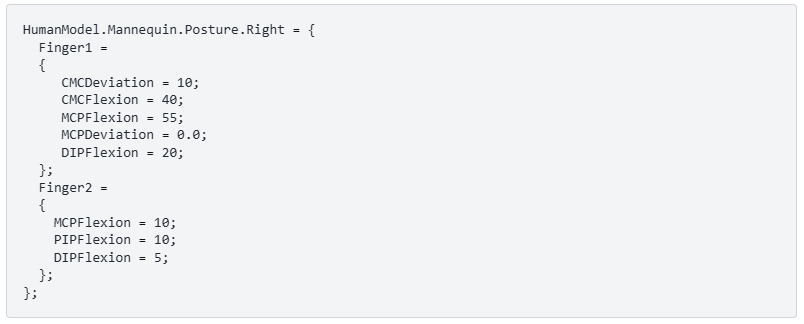
BodyModel 정의를 아래와 같이 정의하면 사용자가 사용할 수 있습니다.

- 마네킹 파일에서 손 모델의 자세를 지정하지 않았다면 아래와 같이 지정할 수 있다.
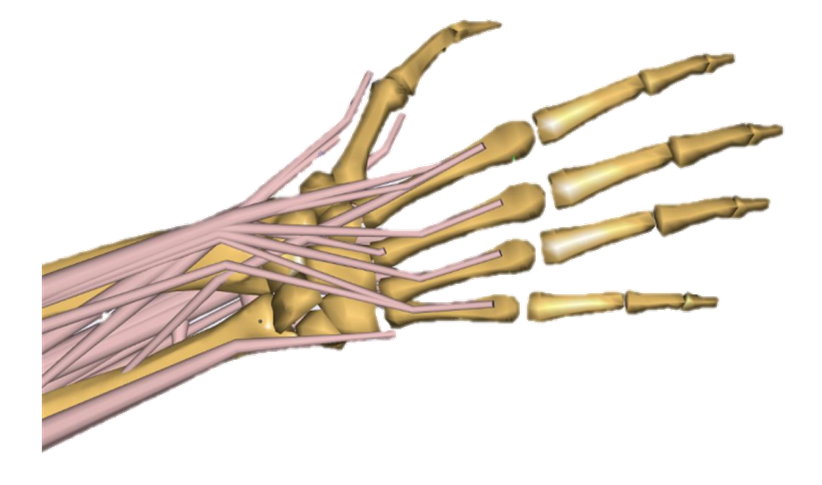
Regensburg-Ulm-Hand-Model (RUHM) - 새로운 근골격 손 모델
- 레겐스부르크 대학 생체역학 연구실과 울름 대학 생체역학 연구실의 공동 연구 프로젝트로 근육을 포함한 새로운 근골격 손모델을 개발하였습니다.
- 새로운 Detailed Hand Model을 이용하기 위해서는 설치 파일이 필요합니다.

기존 Hand 모델의 한계
- 내재근(intrinsic muscles)이 없음
- 내재근은 손가락의 움직임을 조절하며 손가락을 벌리거나 모으는 등의 세밀한 움직임을 담당함.
- 외재근(extrinsic muscles)이 손바닥 뼈에서 끝남
- 외재근은 팔에서 시작하여 손으로 이어지는 근육으로 손가락을 크게 움직이는데 주로 사용함.
- 손바닥이 하나의 세그먼트로 구성되어 손가락을 구부리고 오므릴 수 없음.
- 손목의 회전이 불가능함.
해부학적 데이터의 결정
- 16구의 카데바의 전완 연구에 기반한 해부학적 데이터
- 근육과 인대의 정렬 결정
- 근육 특성 결정
- 뼈 구조 결정
- MRI 스캔 데이터 활용

근육 경로 및 피부 저항요소 모델링
- 근육 경로 및 피부 저항요소 모델링
- 손가락 관절과 손목에서 고리 인대 역할을 하는 기하학적 래핑 표면의 구현
- 외전 시 인대에 의한 피부 저항요소 모델링

DIP - PIP 관절 관계 구현
- DIP(Distal Interphalangeal)과 PIP(Proximal Interphalangeal) 관절의 관계 구현

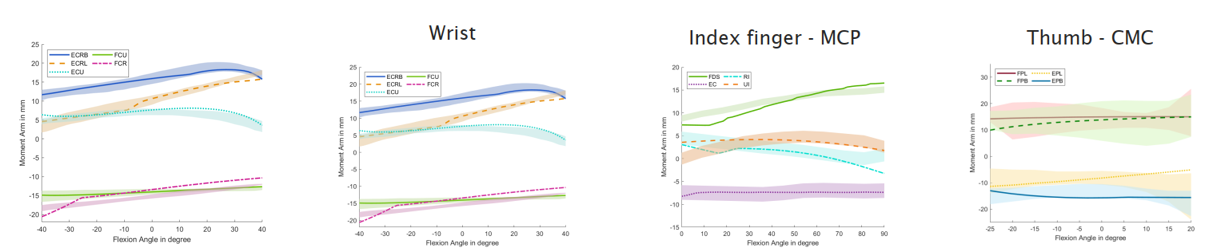
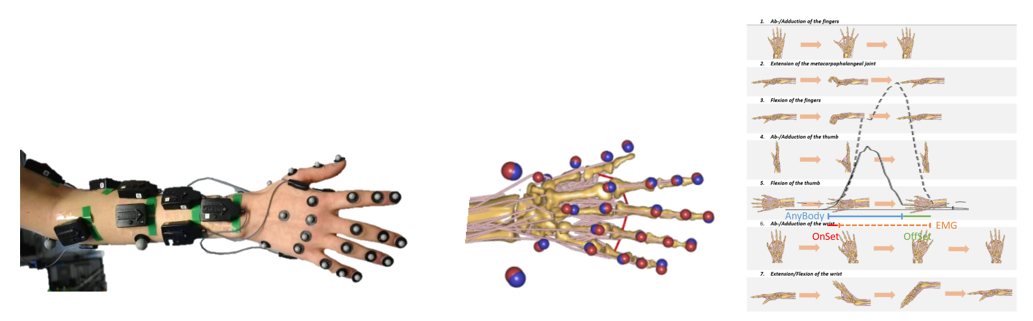
Detailed Hand Model의 검증과정
- 이론적 검증
- 문헌에서의 모멘트 암 비교
- 실험적 검증
- 측정된 근육 활동과 수치적으로 얻은 근육활동 비교
모델 문의
E-mail: tech.support@cmet.co.kr | Tel: 02-6335-7751
'AnyBody > AMMR' 카테고리의 다른 글
| 하체 근골격 모델 개요 및 버전 별 특징 (0) | 2026.04.07 |
|---|---|
| AnyBody를 활용한 웨어러블 로봇 개념설계 (0) | 2025.05.28 |

