Force Plate 모델의 Residual Force
Force Plate가 있는 AnyMoCap 모델을 Inverse dynamics 해석 후 Chart에서 ModelEnvironmentConnection을 확인해보면 Pelvis에서 HumanGroundResiduals 값을 확인할 수 있습니다.
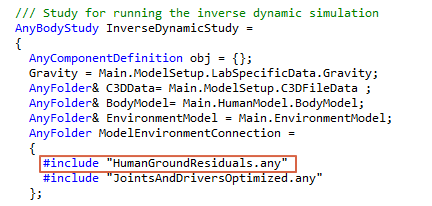

AnyBody 인체모델의 지면 반발력과 실제 측정된 Force Plate의 반발력은 여러가지 이유로 차이가 발생할 수 있으며, 이 오차를 완전히 없애는 것은 불가능합니다. 이러한 불일치를 보정하기 위해 AnyBody는 Pelvis에 Residual Force를 적용시킵니다.
예를 들어 체중이 80kg인 인체모델은 한발로 디딜 때 중력에 의해 지면 반발력은 약 800N이 작용합니다. 그런데 Force Plate에서 측정된 반발력은 600N이 작용한다면 약 200N의 오차가 발생하게 되고 이 부족한 힘(Residual Force) 을 Pelvis에 적용시켜 인체모델의 전체적인 힘의 균형을 유지시켜 줍니다.
만약, Residual Force가 매우 크게 발생한다면 이는 실제 모델과 AnyBody 인체 모델의 차이가 크다는 것을 의미하고 이는 해석결과의 정확성을 저하시킬 수 있게 됩니다.
아래 그래프는 예시와 같이 약 600N의 Force Plate 지면 반발력 데이터를 이용해 체중이 80kg인 AnyBody 모델을 Inverse dynamics를 수행해보면 지면 반발력의 오차가 발생하여 약 200N의 Residual Force가 발생하는 것을 확인할 수 있습니다.

Residual Force를 'Hand of God'으로 비유적으로 표현하기도 합니다.

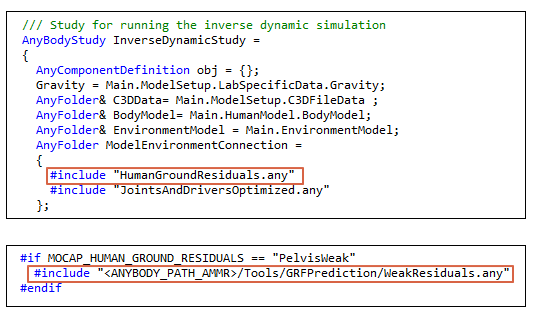
GRF Prediction 모델의 Weak Residual Force
Ground Reaction Force Prediction 모델에서는 새로운 Residual Force를 적용합니다. WeakResidual은 GRF Prediction 모델을 사용할 때 지면 반발력의 예측을 더 정확하게 하기 위해 사용되며 특정 제한 조건 하에 작용하는 매우 약한 형태의 Residual Force입니다.
AnyMoCap 모델에서는 MOCAP_USE_GRF_PREDICTION이 ON으로 설정되면 기본적으로 WeakResidual이 활성화 됩니다.
'AnyBody > FAQ' 카테고리의 다른 글
| AnyRefFrame 클래스의 r, rDot, rDDot, Axes, r0, Axes0, sRel, ARel 은 어떤 값인가요? (0) | 2024.06.13 |
|---|---|
| 시뮬레이션 결과 저장/불러오기 방법 (0) | 2024.06.12 |
| Driver의 Reaction.Type의 On/Off 차이 (0) | 2024.06.11 |
| Inverse dynamics 해석 시 KKT Matrix Solver Error가 발생하는 이유? (0) | 2024.02.22 |
| 시뮬레이션 결과 동영상 저장 방법 (0) | 2024.02.22 |



